突破水下巡检瓶颈!华侨大学研发仿生机械鱼,为管道安全装上“智慧眼睛”
近日,华侨大学科研团队历经多轮技术攻关,研发的“智鱼巡检——基于OpenMV的仿生机械鱼水下管道自主巡检系统”项目取得关键性突破。该系统创新性地将仿生工程设计与先进的OpenMV机器视觉技术深度融合,成功破解了传统水下管道巡检领域长期存在的灵活度不足、检测精度低、作业安全风险高以及数据传输不稳定等行业痛点,为市政、能源、海洋工程等领域的水下管道运维工作,提供了一套兼具高效性、安全性与智能化的全新解决方案,填补了中小型水下管道精准自主巡检的技术空白。
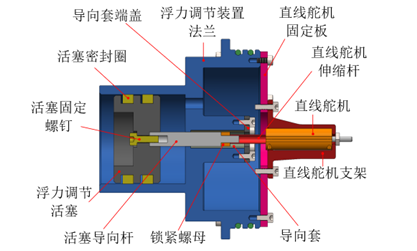
水下管道作为能源运输、市政排水、海洋油气输送等领域的“生命线”,其安全稳定运行直接关系到国民经济发展、城市正常运转与民生保障。据相关行业数据显示,我国现有水下管道总里程超10万公里,其中市政排水管道占比超60%,部分管道已运行20年以上,老化腐蚀问题突出,每年因管道缺陷引发的泄漏、坍塌等事故造成的经济损失超百亿元。然而,长期以来,水下管道巡检一直是行业内的共性难题。在传统巡检方式中,人工潜水作业是主流手段之一,但这种方式不仅面临水下高压、暗流冲击、缺氧窒息、有毒有害气体中毒等多重安全风险,且受人体生理极限限制,单次作业时间通常不超过30分钟,单日巡检里程不足200米,效率极低;而履带式机器人、常规潜水器等设备则普遍存在体型笨重、转向灵活性不足的问题,以常见的履带式管道机器人为例,其机身宽度多在500mm以上,难以适配直径1米以下的狭窄管道,且在弯道角度超过30°的管道中极易发生卡滞现象,同时履带与管道内壁的摩擦还可能造成二次损伤,此外这类设备还存在大面积检测盲区,无法实现全链路覆盖巡检。针对这一行业痛点,华侨大学研发团队组建专项攻关小组,深入海洋馆、水族馆开展水生生物游动机理研究,通过高速摄像捕捉金枪鱼、鲨鱼等高效游动生物的体态与鳍部运动规律,最终借鉴金枪鱼流线型体态与高效尾鳍推进原理,创新设计出“模块化机身+柔性尾鳍”的仿生机械鱼结构。机身主体选用轻质高强度航空铝合金材料,经阳极氧化特殊处理后,大幅提升了水下抗腐蚀性能与使用寿命,可适应淡水、海水等不同水体环境,整体重量严格控制在8kg以内,较传统履带式机器人重量减轻60%以上,有效降低了水流阻力。同时,尾鳍采用硅胶-碳纤维复合材质,兼具柔性与强度,通过高精度舵机驱动可实现0-30°的灵活角度调节,配合两侧辅助胸鳍的协同作用,能够轻松实现前进、转向、上浮、下潜等多自由度精准运动,可灵活穿梭于500mm-2000mm不同直径的管道空间,最小转弯半径仅300mm,完美适配各类狭窄管道与复杂弯曲的作业场景,彻底解决了传统设备的适配性难题。
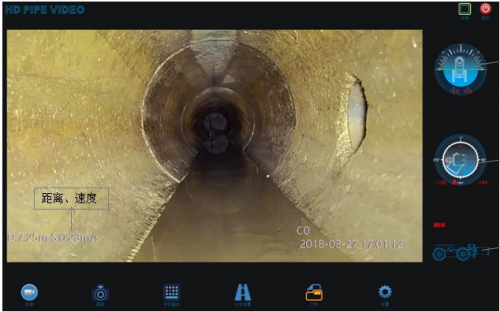
在核心的检测精度方面,该系统搭载了高性能OpenMV H7 Plus作为核心视觉处理模块,这款模块具备高性能图像处理器与低功耗特性,非常适配水下移动设备的应用需求。研发团队创新性地采用“图像增强+多特征融合识别”的复合算法体系,从根源上解决了水下视觉检测的技术难题。水下环境复杂多变,光线随着水深增加会快速衰减,在水深5米以下的管道内,自然光强度不足地面的1%,同时水体中的悬浮颗粒会造成光线散射,导致成像模糊。针对这一问题,系统专门集成了高亮度LED补光模块,其亮度可在500-2000lux范围内自适应调节,并通过自主研发的自适应曝光控制算法,能够根据不同水体透明度、不同水深环境动态调整光线强度与曝光时间,确保成像清晰度;针对水体浑浊导致的图像模糊、细节丢失问题,团队摒弃了传统单一的滤波算法,采用直方图均衡化与双边滤波组合算法对图像进行预处理,既有效提升了图像对比度,又最大程度保留了缺陷细节,避免了单一算法导致的细节丢失或噪声残留问题。在缺陷识别环节,系统融合了边缘检测、纹理特征提取与轻量化CNN深度学习模型,通过大量管道缺陷样本(涵盖裂缝、腐蚀、焊缝缺陷、接口渗漏等10余种常见缺陷,样本量超10万张)训练优化模型,能够精准识别管道各类微小瑕疵。经第三方权威机构实测,该系统最小可检测缺陷尺寸达1.5mm,识别准确率超95%,较传统视觉检测方案精度提升30%以上,漏检率控制在2%以下。同时,为解决水下GPS信号完全失效导致的导航偏差问题,团队创新性地融合了OpenMV视觉定位、惯性导航(IMU)与管道特征匹配定位技术,构建了多传感器融合导航系统。通过OpenMV模块实时采集管道内壁的预设二维码标记点或天然几何特征(如接口、焊缝),结合惯性导航模块的姿态与速度数据,通过卡尔曼滤波算法进行数据融合,有效修正导航偏差;结合预设的管道CAD地图,采用A*路径规划算法,可提前规划最优巡检路径,同时具备自主避障功能,若检测到管道内的障碍物(如沉积淤泥、杂物堵塞),可自动调整路径绕开。该导航系统实现了水下100m长距离巡检定位误差≤5cm,确保巡检路径全覆盖、无遗漏,彻底解决了传统水下巡检设备的导航漂移问题。
据项目负责人介绍,该系统在通信与续航能力上也实现了大幅升级。系统采用“水声通信+无线射频备份”的双通信模式,其中水声通信模块可实现水下100m内巡检图像、缺陷数据、位置信息等内容的实时传输,传输速率≥100kbps,确保地面控制中心能够实时掌握巡检动态;无线射频模块则专门用于近岸浅水区(≤5m水深)的快速数据导出,大幅提升了数据处理效率。在续航方面,团队优化了电源管理系统,选用高容量锂电池(容量10000mAh),并采用低功耗休眠策略,在非检测时段自动降低模块工作功率,将系统续航时间提升至6小时以上,可完成单次1000m管道的连续巡检任务。相较于传统巡检方式,该系统的巡检效率提升10倍以上,人力成本降低60%,同时彻底规避了人工水下作业的各类安全风险,保障了作业人员的生命安全。目前,该系统已在市政排水管道、小型油气输送管道等多个场景完成实地测试,各项性能指标均达到预期标准。未来,该系统可广泛应用于市政排水、油气输送、海洋工程、工业循环水管道等多个领域的管道运维工作,有望推动整个水下巡检行业向智能化、安全化、高效化转型。
推荐阅读:

